Autonomous Fruit Conveying Mobile Robot
Overview
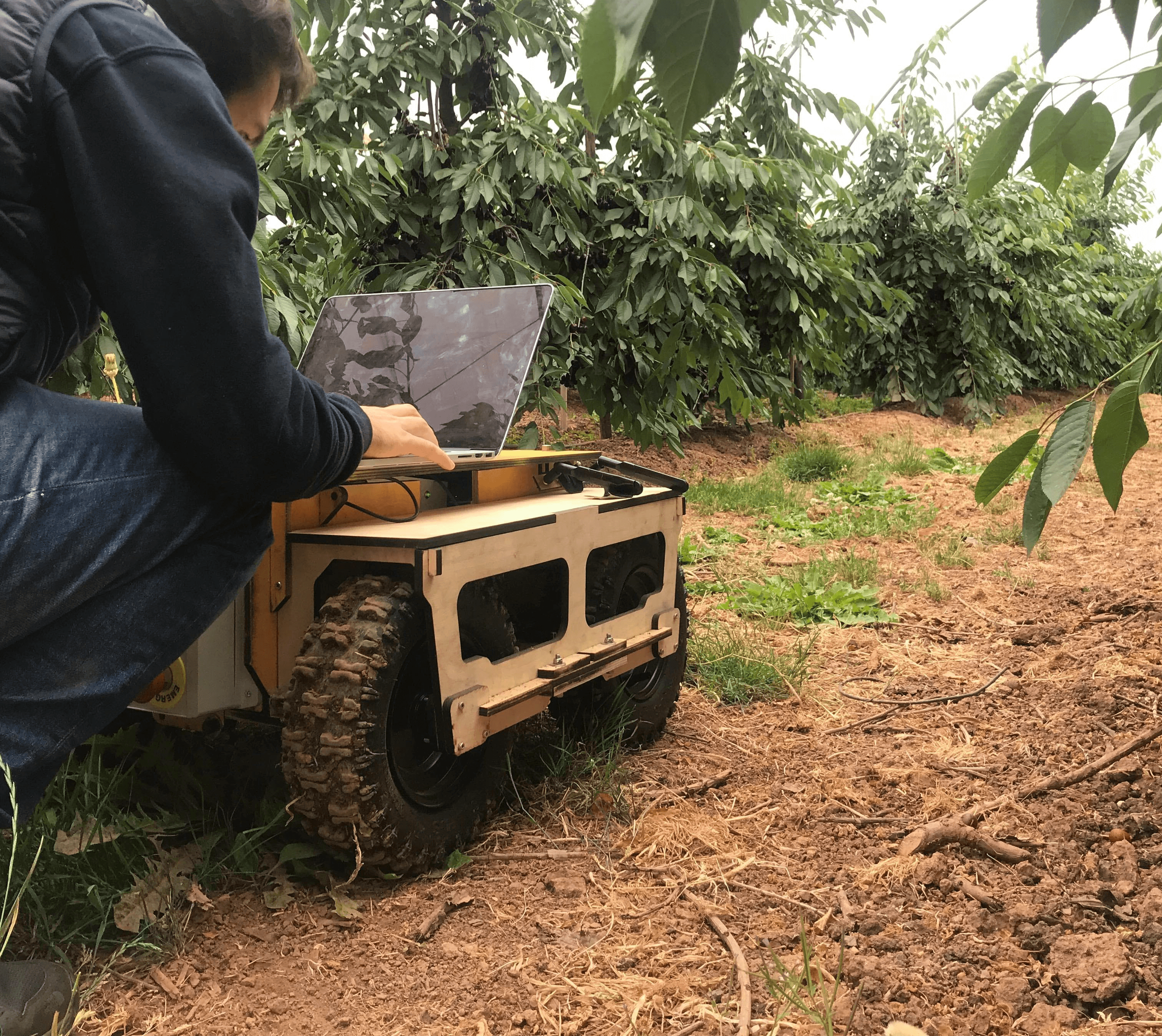
Building an autonomous agricultural robot to support fruit pickers in the field.
Role | Robotics Engineer | |
Duration | 2020 - 2021 | |
Team | 3 people | |
Scope of Work | Software Engineering - Object Detection, SLAM, RANSAC, State Machines |
The challenge
The agricultural industry is suffering a workforce shortage which is leading to tonnes of fruit being left to rot every year. How can we increase efficiency to ensure demand is met with a smaller workforce?
The details
What started as my final year project for my MEng in Integrated Design Engineering grew to a full time work experience as part of design and research organisation, UNMND. Together with two other engineers, we took my final year project research and development and built an outdoor autonomous mobile robot for agriculture. My focus over the year was developing the main software stack to enable autonomous navigation around fruit orchards and vineyards. I worked on all aspects from reactive row following, SLAM integration, person following and teach and repeat which enabled me to acquire new knowledge about autonomous systems, navigation and machine learning.




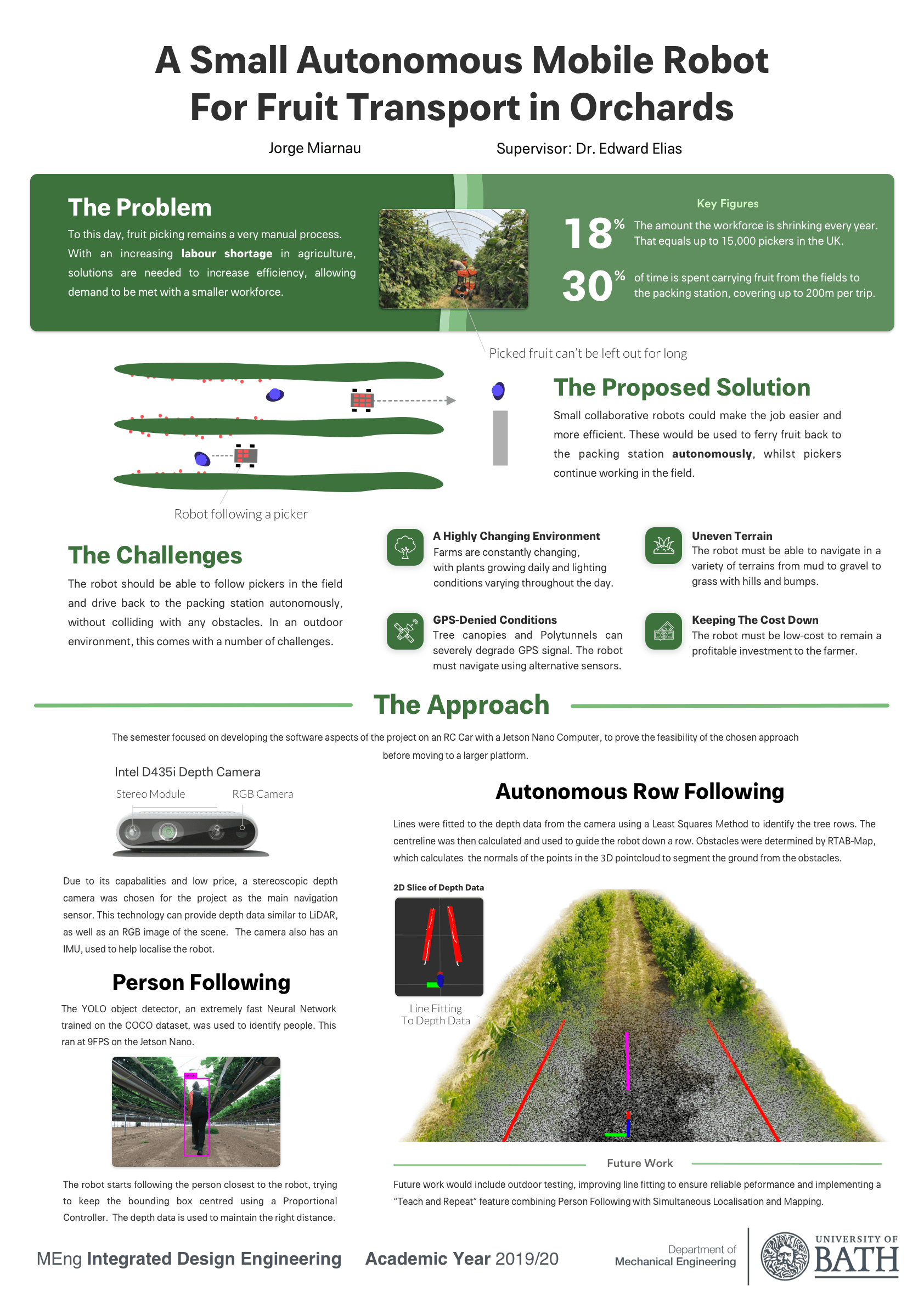
Final Year Project Poster